Dự án tập trung phát triển một mẫu máy bay không người lái (drone) đa năng, hiệu suất cao, có khả năng giải quyết các bài toán thực tiễn trong công nghiệp và nông nghiệp.
Người thực hiện
Khanh Nguyen, Duy Nguyen, Long Hoang, Kiet Park
Chương trình
Cử nhân Kỹ thuật (Điện tử và Hệ thống Máy tính) – chương trình danh dự
Giảng viên hướng dẫn
TS. Dinh-Son Vu, ThS. Khuong Vinh Nguyen
Bối cảnh và mục tiêu
Máy bay không người lái ngày càng đóng vai trò quan trọng trong các lĩnh vực như nông nghiệp, vận chuyển và ứng cứu khẩn cấp. Tuy nhiên, nhiều hệ thống hiện tại còn hạn chế về tính ổn định và khả năng điều khiển tự động trong các điều kiện môi trường khắc nghiệt. Dự án này hướng đến việc phát triển một mẫu máy bay không người láo mới có độ bền cao, khả năng thích ứng tốt và cấu hình linh hoạt để phục vụ nhiều ứng dụng thực tiễn.
Mục tiêu dự án
- Nâng cao tính ổn định và độ tin cậy khi vận hành trong điều kiện khắc nghiệt
- Tích hợp khả năng điều hướng tự động
- Mở rộng chức năng: thiết kế thêm bộ kẹp song song phục vụ các nhiệm vụ thao tác chuyên biệt
Phương pháp và nguyên mẫu
Quá trình phát triển mẫu drone Fennek bao gồm các bước chính:
- Tối ưu hóa thiết kế khung máy: lựa chọn vật liệu nhẹ, bền và tối ưu cơ học
- Hệ thống điều khiển tiên tiến: sử dụng bộ điều khiển Pixhawk 4 tăng khả năng điều hướng
- Tích hợp cảm biến định vị và tự động hóa: GPS, IMU, ESCs, module truyền thông
- Thiết kế mô-đun: hỗ trợ tích hợp các công cụ và cảm biến chuyên biệt (Gripper, Camera, LiDAR…)
- Thử nghiệm lặp lại: tiến hành nhiều vòng thử nghiệm và hiệu chỉnh để đảm bảo độ ổn định
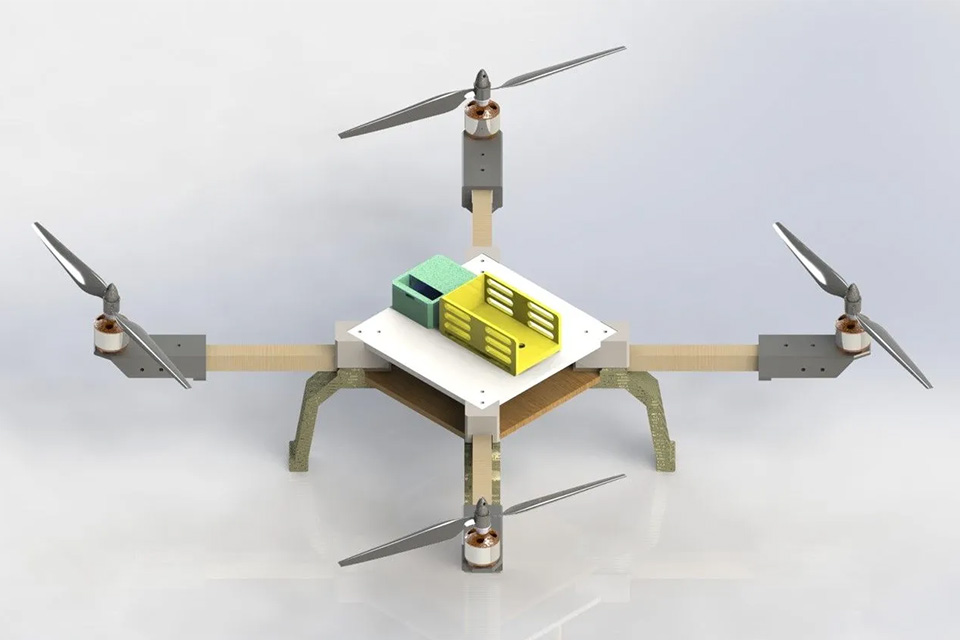 Nguyên mẫu 1
Nguyên mẫu 1
Khung cơ bản, kết nối hệ thống điện và cảm biến chuyển động
 Nguyên mẫu 2
Nguyên mẫu 2
Nâng cấp toàn diện với Pixhawk 4, GPS, mô-đun truyền thông và bộ xử lý cảm biến mạnh hơn.
Thử nghiệm và kết quả
- Hệ thống hiệu chỉnh và cân bằng được triển khai để bảo đảm cấu hình bay ổn định, dễ vận hành
- Thử nghiệm thành công chế độ bay tự động bằng định vị GPS, với khả năng thích ứng cao trong điều kiện môi trường thay đổi
- Drone thể hiện hiệu suất bay ổn định cả trong môi trường ánh sáng yếu và gió lớn
- Hệ thống tải chuyên biệt được tích hợp thành công, bao gồm bộ kẹp song song và mô-đun cảm biến phát hiện lửa (fire detection sensor)
- Drone có thể mang được tải trọng lên đến 1,5 kg với chi phí hợp lý, phù hợp để mở rộng nghiên cứu và ứng dụng thực tiễn

Tùy biến tải trọng
Bộ kẹp song song 3D được thiết kế cho phép tùy biến dễ dàng theo từng ứng dụng cụ thể, góp phần tăng khả năng thích ứng và mở rộng tiềm năng triển khai thực tế của hệ thống.
Kết luận và phát hiện chính

Dự án đã chế tạo và thử nghiệm thành công hai nguyên mẫu drone từ đầu. Nguyên mẫu đầu tiên cung cấp dữ liệu ban đầu về động lực học bay, qua đó xác định các hạn chế về độ ổn định và tính tự động. Nguyên mẫu thứ hai được nâng cấp đáng kể với khung máy nhẹ hơn, bộ điều khiển Pixhawk 4 và khả năng tích hợp cảm biến tốt hơn.
Mẫu drone này được thiết kế để điều hướng tự động dựa trên tín hiệu GPS, giúp đảm bảo khả năng hoạt động ổn định trong nhiều điều kiện môi trường như gió mạnh và ánh sáng yếu. Việc bổ sung bộ kẹp song song được in 3D giúp thực hiện các tác vụ giao – nhận linh hoạt, trong khi việc tích hợp cảm biến phát hiện lửa với kiến trúc Z-Performance đã mở rộng ứng dụng của drone trong giám sát môi trường.
Sau quá trình thử nghiệm và tinh chỉnh, drone có thể mang tải trọng lên tới 1,5 kg và thực hiện điều hướng tự động ổn định với độ chính xác cao. Dự án không chỉ đóng góp vào việc cải tiến công nghệ drone mà còn là cơ sở cho nghiên cứu tiếp theo về khả năng tự động hóa và mở rộng ứng dụng trong nhiều lĩnh vực khác nhau.
Mặc dù phiên bản hiện tại đã chứng minh được hiệu quả trong môi trường thử nghiệm, nhóm nghiên cứu nhận định rằng cần có thêm các bước hoàn thiện để triển khai ở quy mô thực tế, đặc biệt là trong việc đáp ứng các yêu cầu pháp lý tại Việt Nam.