The project focuses on developing a versatile, high-performance drone capable of addressing real-world challenges in industrial and agricultural sectors.
Contributors
Khanh Nguyen, Duy Nguyen, Long Hoang, Kiet Park
Program
Bachelor of Engineering (Electronic and Computer Systems Engineering) (Honours)
Academic supervisors
Dr. Dinh-Son Vu, Dr. Khuong Vinh Nguyen
Background and objectives
Drones are becoming essential tools in industries like agriculture, logistics and emergency response. Many existing drones face challenges with stability and require significant manual control, limiting their effectiveness. There is a pressing need to develop drones with enhanced stability, autonomy and specialized capabilities to meet the demands of real-world applications. This project aims to:
- Enhance stability: improve flight stability in diverse and challenging conditions.
- Increase autonomy: implement advanced autonomous navigation capabilities.
- Expand payload functionality: integrate a parallel gripper and fire detection system.
Methodology and prototypes
The development process of the Fennek drone involves several key steps:
- Design optimization: lightweight carbon fiber frame ensures strength and durability.
- Advanced control system: Pixhawk 4 flight controller enhances stability.
- Autonomous navigation: utilizes GPS for precise outdoor navigation.
- Modular architecture: facilitates easy upgrades and integration of specialized tools.
- Testing and iteration: prototypes undergo multiple iterations for continuous refinement.
 Prototype drone 1
Prototype drone 1
Prototype 1 features a power system connected to a flight controller (ESP32), managing ESCs and motors, sensors (IMU) and a communication module (Radio Controller).
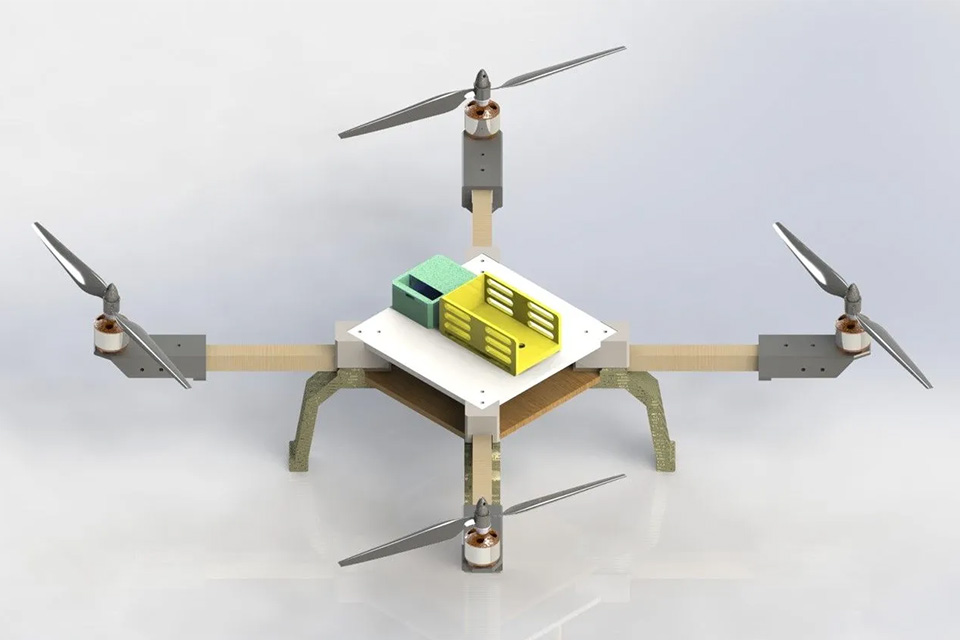
 Prototype drone 2
Prototype drone 2
Prototype 2 includes a power system connected to a Pixhawk flight controller, managing ESCs and motors, sensors (GPS, IMU, Gyro), communication module (Telemetry, RC) and a payload system (Gripper, Camera).
Experiments and resutls
- Setup and calibration: mission planner was utilized for precise setup and calibration, ensuring optimal system performance.
- Autonomous navigation: QGroundControl enabled accurate trajectory planning, with the drone following paths with minimal error, depending on trajectory complexity and GPS signal.
- Environmental performance: the drone successfully operated in light wind and rain, demonstrating reliability in various weather conditions.
- Payload capacity: achieved stable flight with a 1.5kg payload, using cost-effective components.
- Integration and testing: the gripper and fire detection system were successfully integrated, confirming the drone’s potential for further research and specialized applications.

Payload flexibility
Gripper versatility: The 3D-designed parallel gripper can be easily customized for different tasks, enhancing the drone’s adaptability and expanding its potential applications.
Conclusion and findings

This project involved the creation of two prototypes that were built from scratch. The first prototype provided valuable insights into basic flight dynamics but revealed limitations in stability and autonomy. The second prototype incorporated significant improvements, including a lightweight carbon fiber frame, the advanced Pixhawk 4 flight controller and enhanced sensor integration.
This drone is designed for precise autonomous navigation using GPS, making it reliable in various environmental conditions, including light wind and rain. The addition of a 3D-designed Parallel Gripper mechanism allows for effective payload delivery, while collaboration with the Z-Performance team led to the successful integration of a fire detection system, further expanding its potential applications.
After extensive testing and development, the drone has proven that it can effectively transport payloads of up to 1.5kg and have a slight deviation in the trajectory following for autonomous navigation. Overall, this project not only demonstrates advances in drone technology but also provides a basis for further study and development of the principles of autonomous systems as well as specific uses of drones. The drone project successfully addressed key challenges in drone operations, improving stability and navigation. While the current prototype shows potential, further refinement is needed for real-world deployment, especially considering regulatory requirements in Vietnam.